Visual impairment is one of the severe types of disabilities and, despite of numerous advances in technology, it remains a serious mobility problem even today. About 285 milion people worldwide are visually impaired, according to the World Health Organization.
One of the most difficult aspects of visual impairment is the lack of orientation in unknown environments both outdoor and indoor resulting in a dependency on sighted individuals for navigation. A primary future application field of Telocate ASSIST is the creation of an indoor navigation system to address the chalanging task of serving an orientation in unknown environments. Our system is capable of this application due to its distinctive precision of 20 cm that outperforms any other system for indoor smartphone navigation.

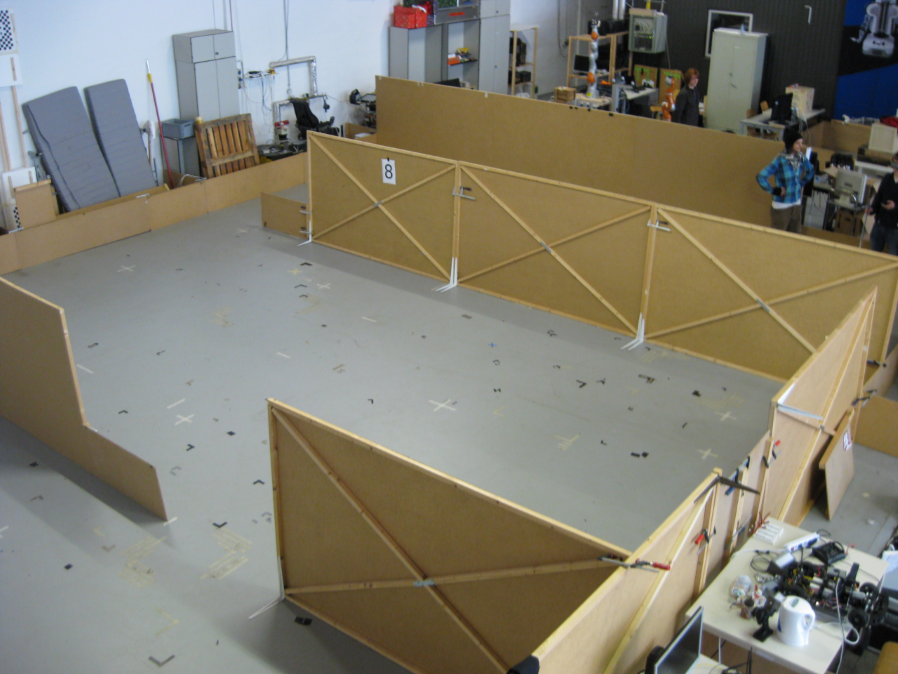
In collaboration with the Center for Cognitive Science of the Institute of Informatics and Society (IIG), University of Freiburg, we have created and conducted an experiment to learn more about the demands and wishes of blind people. The governing question of the experiment was, how can blind, or blindfolded people, navigate through a maze given only instructions from a smartphone and a blind peoples’ white cane?
For the experiment setup three experimental modes were created:
- In Nearby the test persons were to be given only information about POIs in the close vicinity. The mode should allow moderate wayfinding and give hardly any overview of the map, leading to a moderate mental representation of the map.
- In Vista the test persons were given information of all POIs in their “visible” range, i.e. all POIs in a room where no maze wall would separate the line-of-sight of the user and the POI. The mode was expected to enable rather weak wayfinding, but a good overview and the best mental map of the maze.
In the experiment 23 test persons participated. Each of them should, unaware of the layout of the maze and entirely blindfolded, complete certain tasks inside the maze. Everyone conducted two runs in both mazes with two of the three experiment modes. The test persons were equipped with a smartphone with the navigation app running and with headphones for the audio input. This turned out to make the audio cues better understandable, compared to the built-in speaker of the phone. Furthermore, the persons received a white cane to feel and avoid obstacles.
We expected that multiple experimental modes are necessary for different use cases, which depend on the intention of the user. The navigation mode allows the user a very target oriented motion without lots of information about the surrounding POIs. In contrast, the vista mode informs the user about all POIs in the visible range resulting in weaker wayfinding but best overview of the surroundings. The nearby mode is a tradeoff between the navigation mode and the vista mode allowing a less target oriented motion but a way better overview of the scenery than in navigation mode.
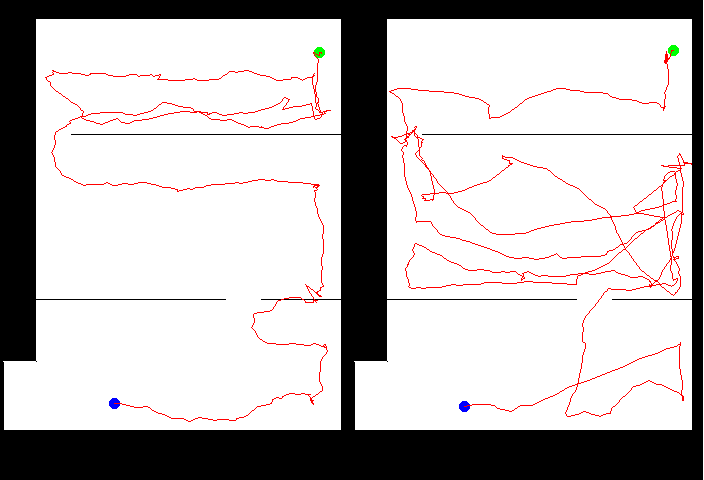
The experiment demonstrated, that ASSIST accomplishes the expected high-precision navigation, and how a navigation frontend can help blind (-folded) people navigate through an unknown environment indoors.
The proposed application is ambitious in its technical and social implications. Not only that we need a system that is trusted from its technical performance, an important task is to convince the user to rely on the system. Especially, since the use of indoor navigation based on a smartphone may imply to leave off a third person to guide the blind person, and walk on their own instead.
The experiment was executed in context of FIWARE-ASSIST with support of the FIWARE accelerator program frontierCities.
 |
The project FIWARE-ASSIST has received funding from the European Union’s Seventh Framework Programme for research, technological development and demonstration through the frontierCities accelerator programme (grant agreement no. 632853) under the sub-grant agreement no. 006. |